ME 528: Modern Robotics - Fall 2018, Fall 2019, Fall 2020, Spring 2022, Spring 2023, Spring 2024, Spring 2025
(ME 528X: Advanced Robotics)
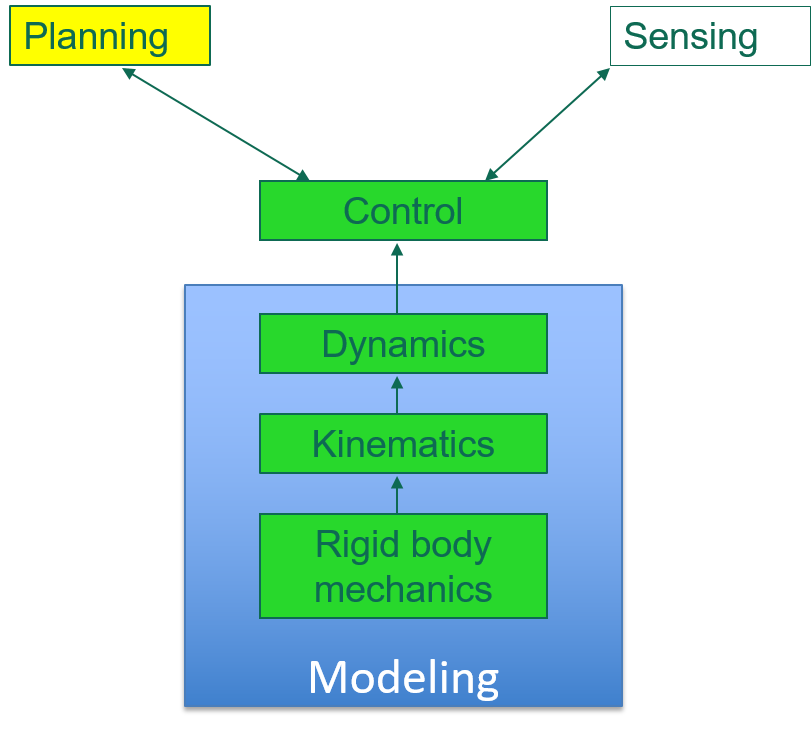
This course gives students a full overview of modern robotics, provides the basic knowledge on the foundations of various aspects of robotics, and equips students with inherently interdisciplinary skills in advanced robotics. A numbered list of the topics that are covered:
- Introduction to robotics
- Spatial description and configuration space, rigid motions and homogeneous transformation
- Forward kinematics
- Inverse kinematics
- Differential kinematics and Jacobians
- Manipulator statics
- Manipulator dynamics
- Path generation
- Motion planning
- Motion control
- Mobile robots
- Actuators and sensors
- Tentative topics: SLAM, machine learning, visual servoing, etc.
In this course, students will also develop a good understanding of the software tools in modeling, control and planning.

ME 428: Robotics - Spring 2018, Spring 2020, Spring 2021, Spring 2022, Spring 2023, Spring 2024, Spring 2025
In this interactive course, students will find out how to build a robot, use feedback from sensors, apply mathematics and measurement to program the robot to navigate in its environment and accomplish different tasks. More advanced topics are included briefly, i.e., robot motion control, path planning and artificial intelligence.
ME 428 has been recognized as one of the 34 Cool Classes at Binghamton University by the Binghamton University Blog in 2022, and one of the 25 Coolest Classes You Can Take at Binghamton, featured in the Binghamton University Blog in 2024.
ME 424: Control System in Mechanical Engineering - Spring 2019, Spring 2020, Spring 2021, Fall 2021, Fall 2022, Fall 2023, Fall 2024, Fall 2025
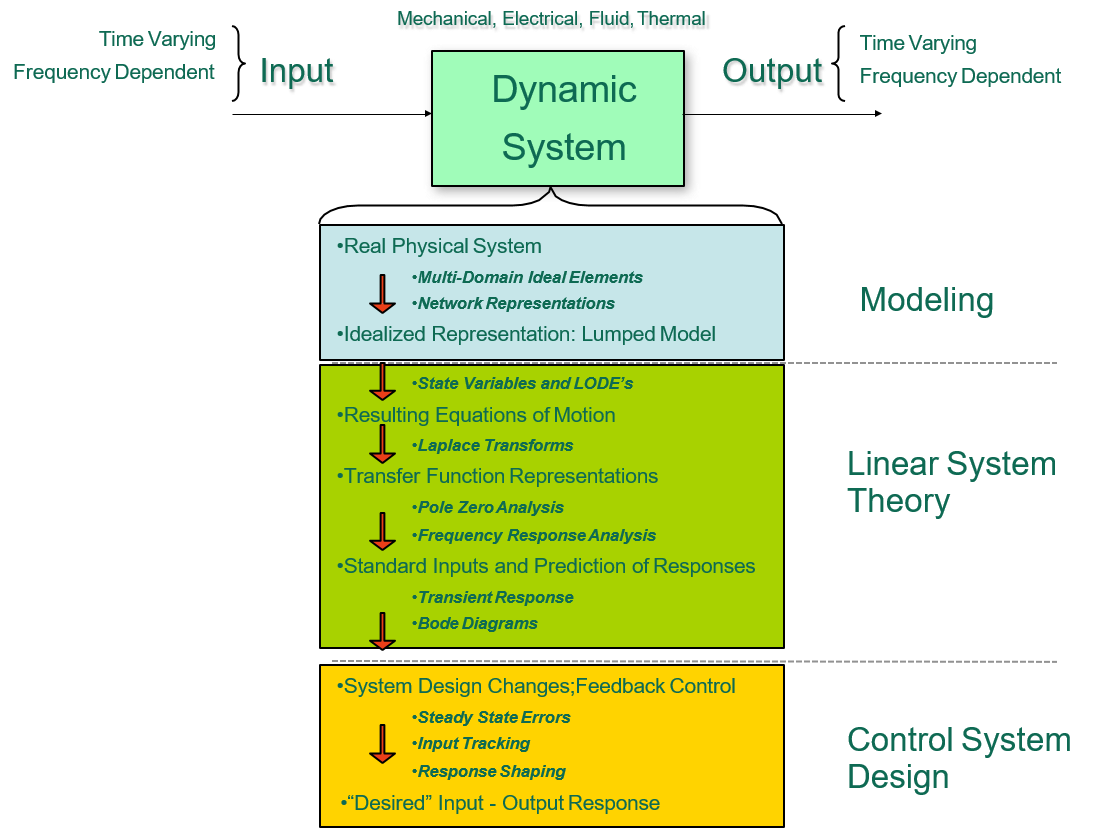
The course introduces students to the basic concepts regarding modeling, analysis, and control of dynamic systems and provides students with a basic understanding of the techniques employed in control systems analysis. Even though many of the concepts related to dynamic systems are generally applicable to all sorts of systems, special emphasis will be placed on the applications of these concepts to mechanical and aerospace, electromechanical, electrical and vibrations systems. By the end of this course, student should be able to
- Make mathematical modeling of electromechanical systems.
- Arrange the equations in state space form.
- Design controllers to increase system stability.
- Use techniques such as time-domain, frequency-domain to evaluate the system performance and stability.
- Applications of MATLAB in control systems analysis.
Course Content
- Introduction to control systems
- Modeling of mechanical systems
- Modeling of electrical systems
- Laplace transforms
- Transfer functions
- Block diagrams
- State space equations
- Modeling of electromechanical systems
- 1st order system response
- 2nd order system response
- Transient response and steady state error
- Stability analysis
- PID control
- Root locus
- Pole/zero analysis
- Frequency response derivation
- Bode diagram
- Transfer function from Bode
Capstone Projects
- Smart Micro-Particle Manipulation Chamber'' (K. McManus, D. Mertl, H. Babu, N. Cesped), 2024/2025
- Micro Aquarium (Q. O’Brien, S. Pappalardo, J. Pareti, S. Savidge), 2023/2024
- Autonomous RC Race Car with Artificial Intelligence (L. Roels, A. Ryan, V. Obando, B. Shiya, C. Grillo), 2023/2024, co-advise with Prof. Jingzhou Zhao.
- Design and Prototype of Robotic Manipulator (G. Nowell, M. Madsen, B. Thompson, A. Ricci, C. R. Anderson), 2022/2023
- Robotic Arm Manipulator (B. Iven, J. Jandik, K. Roach, E. Erb), 2021/2022
- RACECAR Upgrade for Autonomous Driving with Aggressive Maneuvers (W. Linderman, C. Dai, T. Gao), 2020/2021
- Electrospinning Drum Collector (M. Lindley, H. Yu), 2020/2021, co-advise with Prof. Pu Zhang.
- RACECAR Upgrade for Autonomous Driving with Aggressive Maneuvers (J. Xing, M. Islam, Y. Tian), 2019/2020
- Reconnaissance Robot (C. Gale, A. Paul, D. Adamczuk, J. McCoy, J. Squitieri), 2018/2019. First Place winner of the 2019 MacDonald Family Prize in Senior Design, co-advise with Prof. Roy McGrann.
- Crack-Filling Robot (M. Jackson, D. Rozhkov, L. S. Bishop, J. Brown, M. Wally, A. K. Reddy), 2018/2019
- RACECAR System Upgrade (J. C. Escober, J. Long, R. Grunder, W. Luo), 2018/2019
- CubeSat Deorbiting Mechanism (J. Chinkel, E. Comas, S. DAttore, C. Long, N. Swerbilov, A. Virga), 2018/2019, co-adviser Prof. Kirill Zaychik.